刚体转动下的向量求导公式
1 运动点在惯性系中的速度公式
考虑一个惯性系 \(I\) 和一个运动坐标系 \(B\) ,原点分别记作 \(O_I\) 和 \(O_B\) 。以下所有讨论,都默认以惯性系 \(I\) 为参考。
固定点的位置导数
当 \(B\) 系绕 \(O_I\) 做角速度为 \(\boldsymbol{\omega}\) 的转动时,考虑 \(B\) 系中的任意一个固定点 P:
\[\frac{\mathrm{d}\vec{O_IP}}{\mathrm{d}t}=\boldsymbol{\omega}\times\vec{O_IP}.\]
证明:
记 P 点初始位置为 \(P_1\) ,运动 \(\Delta t\) 时间后位置为 \(P_2\) 。记 \(\vec{OP}\) 与角速度向量 \(\boldsymbol{\omega}\) 的夹角为 \(\theta\) . 用 \(\mathbf{r}(t)=\mathbf{r}\) 表示 \(\vec{O_IP_1}\) ,用 \(\mathbf{r}(t+\Delta t)\) 表示 \(\vec{O_IP_2}\) ,则变化量为 \(\mathbf{r}(t+\Delta t)-\mathbf{r}=\vec{P_1P_2}\) .
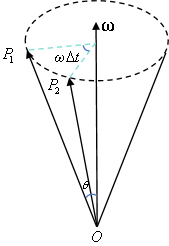
由图可知,变化量的大小为 \(2r\sin\theta\sin\left(\frac{1}{2}\omega\Delta t\right)\) ,变化量的方向和 \(\boldsymbol{\omega}\times(\mathbf{r}(t+\Delta t)+\mathbf{r})\) 一致。因此
\[\begin{aligned}
&\lim_{\Delta t\to 0}\frac{\mathbf{r}(t+\Delta t)-\mathbf{r}}{\Delta t}\\
=& \lim_{\Delta t\to 0}\frac{\frac{\boldsymbol{\omega}\times(\mathbf{r}(t+\Delta t)+\mathbf{r})}{\|\boldsymbol{\omega}\times(\mathbf{r}(t+\Delta t)+\mathbf{r})\|}\cdot2r\sin\theta\sin\left(\frac{1}{2}\omega\Delta t\right)}{\Delta t}\\
=& \lim_{\Delta t\to 0}\frac{\frac{2\boldsymbol{\omega}\times\mathbf{r}}{2\omega r\sin\theta}\cdot2r\sin\theta\cdot\left(\frac{1}{2}\omega\Delta t\right)}{\Delta t}\\
=& \boldsymbol{\omega}\times\mathbf{r}.
\end{aligned}\]
2 固定于运动坐标系的向量求导
固定在 \(B\) 系中的向量导数公式
在此基础上,考虑固定在 \(B\) 系的一个向量 \(\vec{PQ}\):
\[\frac{\mathrm{d}\vec{PQ}}{\mathrm{d}t}=\boldsymbol{\omega}\times\vec{PQ}.\]
证明:
\[\begin{aligned}
\frac{\mathrm{d}\vec{PQ}}{\mathrm{d}t}&=
\frac{\mathrm{d}\vec{O_IQ}}{\mathrm{d}t}-\frac{\mathrm{d}\vec{O_IP}}{\mathrm{d}t}\\
&= \boldsymbol{\omega}\times\vec{O_IQ}-\boldsymbol{\omega}\times\vec{O_IP}\\
&=\boldsymbol{\omega}\times\vec{PQ}.
\end{aligned}\]
3. 任意向量在惯性系与运动系之间的导数关系
3.1 一阶导数变换公式
在此基础上,考虑 \(B\) 系下的一个任意向量 \(\mathbf{r}\) 。
\[\begin{aligned}
\left(\frac{\mathrm{d}\mathbf{r}}{\mathrm{d}t}\right)_{I}
&= \left(\frac{\mathrm{d}\mathbf{r}}{\mathrm{d}t}\right)_{B}+\boldsymbol{\omega}\times\mathbf{r}\\
\ddot{\mathbf{r}}_I
&=\ddot{\mathbf{r}}_B+2\boldsymbol{\omega}\times\dot{\mathbf{r}}_B+\dot{\boldsymbol{\omega}}\times\mathbf{r}+\boldsymbol{\omega}\times(\boldsymbol{\omega}\times\mathbf{r}).
\end{aligned}\]
证明:
设 \(B\) 系的一组正交基向量为 \(\mathbf{i},\mathbf{j},\mathbf{k}\) ,则 \(\mathbf{r}\) 可以表示为
\[\mathbf{r} = r_x\mathbf{i} + r_y\mathbf{j} + r_z\mathbf{k} .\]
因此,\(\dot{\mathbf{r}}_I\) 可以表示为
\[\begin{aligned}
\dot{\mathbf{r}}_I
&= (\dot{r}_x\mathbf{i} + \dot{r}_y\mathbf{j} + \dot{r}_z\mathbf{k}) + r_x\dot{\mathbf{i}} + r_y\dot{\mathbf{j}} + r_z\dot{\mathbf{k}}\\
\left(\frac{\mathrm{d}\mathbf{r}}{\mathrm{d}t}\right)_{I}
&= \left(\frac{\mathrm{d}\mathbf{r}}{\mathrm{d}t}\right)_{B}+r_x\boldsymbol{\omega}\times \mathbf{i}+r_y\boldsymbol{\omega}\times \mathbf{j}+r_z\boldsymbol{\omega}\times \mathbf{k}\\
&= \left(\frac{\mathrm{d}\mathbf{r}}{\mathrm{d}t}\right)_{B}+\boldsymbol{\omega}\times(r_x\mathbf{i}+r_y\mathbf{j}+r_z\mathbf{k})\\
&= \left(\frac{\mathrm{d}\mathbf{r}}{\mathrm{d}t}\right)_{B}+\boldsymbol{\omega}\times\mathbf{r}.
\end{aligned}\]
3.2 二阶导数变换公式
接下来,再对 \(I\) 系求导一次:
\[\begin{aligned}
\ddot{\mathbf{r}}_I
&=\ddot{\mathbf{r}}_B+2\boldsymbol{\omega}\times\dot{\mathbf{r}}_B+\dot{\boldsymbol{\omega}}\times\mathbf{r}+\boldsymbol{\omega}\times(\boldsymbol{\omega}\times\mathbf{r})
\end{aligned}\]
证明:
\[\begin{aligned}
\ddot{\mathbf{r}}_I
&=\left(\frac{\mathrm{d}}{\mathrm{dt}}\right)_I\dot{\mathbf{r}}_B+\left(\frac{\mathrm{d}}{\mathrm{dt}}\right)_I(\boldsymbol{\omega}\times\mathbf{r})\\
&=\ddot{\mathbf{r}}_B+\boldsymbol{\omega}\times\dot{\mathbf{r}}_B+\dot{\boldsymbol{\omega}}\times\mathbf{r}+\boldsymbol{\omega}\times\dot{\mathbf{r}}_I\\
&= \ddot{\mathbf{r}}_B+\boldsymbol{\omega}\times\dot{\mathbf{r}}_B+\dot{\boldsymbol{\omega}}\times\mathbf{r}+\boldsymbol{\omega}\times(\dot{\mathbf{r}}_B+\boldsymbol\omega\times\mathbf{r})\\
&=\ddot{\mathbf{r}}_B+2\boldsymbol{\omega}\times\dot{\mathbf{r}}_B+\dot{\boldsymbol{\omega}}\times\mathbf{r}+\boldsymbol{\omega}\times(\boldsymbol{\omega}\times\mathbf{r}).
\end{aligned}\]